반응형
안드로이드 부분(client)
activity_main.xml
더보기
<?xml version="1.0" encoding="utf-8"?>
<android.support.constraint.ConstraintLayout
xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
tools:context=".MainActivity">
<LinearLayout
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
app:layout_constraintTop_toTopOf="parent"
tools:layout_editor_absoluteX="8dp"
android:weightSum="5"
>
<LinearLayout
android:layout_weight="0.5"
android:layout_width="match_parent"
android:layout_height="0dp"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/connectButton"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:text="연결하기" />
</LinearLayout>
<LinearLayout
android:layout_weight="0.5"
android:layout_width="match_parent"
android:layout_height="0dp"
android:orientation="horizontal"
android:weightSum="2">
<!--
layout_weight="1" 높이
layout_height 높이
weightSum 세로줄
-->
<Button
android:id="@+id/motor00Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor0ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor01Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_weight="0.5"
android:layout_width="match_parent"
android:layout_height="0dp"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor10Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor1ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor11Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor20Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor2ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor21Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor30Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor3ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor31Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor40Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor4ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor41Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor50Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor5ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor51Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal">
<EditText
android:id="@+id/inputEditText"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.5"
app:layout_constraintStart_toStartOf="parent"
tools:layout_editor_absoluteY="301dp" />
<Button
android:id="@+id/sendMsgButton"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.5"
android:text="Send" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="1.5"
android:orientation="horizontal">
<ScrollView
android:id="@+id/logView"
android:layout_width="match_parent"
android:layout_height="match_parent">
<LinearLayout
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical">
<TextView
android:id="@+id/logTextView"
android:layout_width="match_parent"
android:layout_height="match_parent" />
</LinearLayout>
</ScrollView>
</LinearLayout>
</LinearLayout>
</android.support.constraint.ConstraintLayout>
<android.support.constraint.ConstraintLayout
xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
tools:context=".MainActivity">
<LinearLayout
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
app:layout_constraintTop_toTopOf="parent"
tools:layout_editor_absoluteX="8dp"
android:weightSum="5"
>
<LinearLayout
android:layout_weight="0.5"
android:layout_width="match_parent"
android:layout_height="0dp"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/connectButton"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:text="연결하기" />
</LinearLayout>
<LinearLayout
android:layout_weight="0.5"
android:layout_width="match_parent"
android:layout_height="0dp"
android:orientation="horizontal"
android:weightSum="2">
<!--
layout_weight="1" 높이
layout_height 높이
weightSum 세로줄
-->
<Button
android:id="@+id/motor00Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor0ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor01Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_weight="0.5"
android:layout_width="match_parent"
android:layout_height="0dp"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor10Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor1ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor11Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor20Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor2ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor21Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor30Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor3ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor31Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor40Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor4ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor41Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal"
android:weightSum="2">
<Button
android:id="@+id/motor50Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="-" />
<ProgressBar
android:id="@+id/motor5ProgressBar"
style="?android:attr/progressBarStyleHorizontal"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.2"
android:max="180"
android:progress="90"
/>
<Button
android:id="@+id/motor51Button"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.4"
android:text="+" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="0.5"
android:orientation="horizontal">
<EditText
android:id="@+id/inputEditText"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1.5"
app:layout_constraintStart_toStartOf="parent"
tools:layout_editor_absoluteY="301dp" />
<Button
android:id="@+id/sendMsgButton"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="0.5"
android:text="Send" />
</LinearLayout>
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="1.5"
android:orientation="horizontal">
<ScrollView
android:id="@+id/logView"
android:layout_width="match_parent"
android:layout_height="match_parent">
<LinearLayout
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical">
<TextView
android:id="@+id/logTextView"
android:layout_width="match_parent"
android:layout_height="match_parent" />
</LinearLayout>
</ScrollView>
</LinearLayout>
</LinearLayout>
</android.support.constraint.ConstraintLayout>
MainActivity.java
package com.example.myapplication;
import android.os.Handler;
import android.os.Message;
import android.support.v7.app.AppCompatActivity;
import android.os.Bundle;
import android.util.Log;
import android.view.View;
import android.widget.Button;
import android.widget.EditText;
import android.widget.ProgressBar;
import android.widget.TextView;
import java.io.BufferedReader;
import java.io.DataInputStream;
import java.io.DataOutputStream;
import java.io.IOException;
import java.io.InputStream;
import java.io.OutputStream;
import java.io.PipedInputStream;
import java.io.PipedOutputStream;
import java.net.Socket;
import java.util.Arrays;
import java.util.LinkedList;
//https://ginjo.tistory.com/2
public class MainActivity extends AppCompatActivity {
Handler msghandler;
Socket socket;
private String ip = "127.0.0.1"; // IP 주소
private int port = 41000; // PORT번호
EditText inputText;
TextView logText;
int progressCheck;
int motorCheck;
ProgressBar motor0ProgressBar;
ProgressBar motor1ProgressBar;
ProgressBar motor2ProgressBar;
ProgressBar motor3ProgressBar;
ProgressBar motor4ProgressBar;
ProgressBar motor5ProgressBar;
//추가
SocketClient client;
ReceiveThread receive;
SendThread send;
@Override
protected void onStop() {
super.onStop();
try {
socket.close();
} catch (IOException e) {
e.printStackTrace();
}
}
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
//메인쓰레드와 연결해줌
msghandler = new Handler() {
@Override
public void handleMessage(Message hdmsg) {
if (hdmsg.what == 1111) {
switch (progressCheck){
case 0:
motor0ProgressBar.setProgress(hdmsg.arg1);
break;
case 1:
motor1ProgressBar.setProgress(hdmsg.arg1);
break;
case 2:
motor2ProgressBar.setProgress(hdmsg.arg1);
break;
case 3:
motor3ProgressBar.setProgress(hdmsg.arg1);
break;
case 4:
motor4ProgressBar.setProgress(hdmsg.arg1);
break;
case 5:
motor5ProgressBar.setProgress(hdmsg.arg1);
break;
default:
break;
}
}
}
};
motor0ProgressBar=(ProgressBar)findViewById(R.id.motor0ProgressBar);
motor1ProgressBar=(ProgressBar)findViewById(R.id.motor1ProgressBar);
motor2ProgressBar=(ProgressBar)findViewById(R.id.motor2ProgressBar);
motor3ProgressBar=(ProgressBar)findViewById(R.id.motor3ProgressBar);
motor4ProgressBar=(ProgressBar)findViewById(R.id.motor4ProgressBar);
motor5ProgressBar=(ProgressBar)findViewById(R.id.motor5ProgressBar);
Button connectButton=(Button)findViewById(R.id.connectButton);
Button motor00Button=(Button)findViewById(R.id.motor00Button);
Button motor01Button=(Button)findViewById(R.id.motor01Button);
Button motor10Button=(Button)findViewById(R.id.motor10Button);
Button motor11Button=(Button)findViewById(R.id.motor11Button);
Button motor20Button=(Button)findViewById(R.id.motor20Button);
Button motor21Button=(Button)findViewById(R.id.motor21Button);
Button motor30Button=(Button)findViewById(R.id.motor30Button);
Button motor31Button=(Button)findViewById(R.id.motor31Button);
Button motor40Button=(Button)findViewById(R.id.motor40Button);
Button motor41Button=(Button)findViewById(R.id.motor41Button);
Button motor50Button=(Button)findViewById(R.id.motor50Button);
Button motor51Button=(Button)findViewById(R.id.motor51Button);
inputText = (EditText) findViewById(R.id.inputEditText);
Button sendMsgButton = (Button) findViewById(R.id.sendMsgButton);
logText = (TextView)findViewById(R.id.logTextView);
//motor0ProgressBar.setProgress(180);
connectButton.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
client = new SocketClient(ip,port);
progressCheck=0;
//handler.sendEmptyMessage(0);
//threadList.add(client);
client.start();
}
});
motor00Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
//네트워킹 사용을 위해 스레드 사용해야됨
send = new SendThread(socket,"00");
progressCheck=0;
send.start();
}
});
motor01Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"01");
progressCheck=0;
send.start();
}
});
motor10Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"10");
progressCheck=1;
send.start();
}
});
motor11Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"11");
progressCheck=1;
send.start();
}
});
motor20Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"20");
progressCheck=2;
send.start();
}
});
motor21Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"21");
progressCheck=2;
send.start();
}
});
motor30Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"30");
progressCheck=3;
send.start();
}
});
motor31Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"31");
progressCheck=3;
send.start();
}
});
motor40Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"40");
progressCheck=4;
send.start();
}
});
motor41Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"41");
progressCheck=4;
send.start();
}
});
motor50Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"50");
progressCheck=5;
send.start();
}
});
motor51Button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
send = new SendThread(socket,"51");
progressCheck=5;
send.start();
}
});
}
///////////////////////////////////////////////////////////////////////////////////////////////////
//소켓연결
class SocketClient extends Thread {
boolean threadAlive;
String ip;
int port;
InputStream inputStream = null;
OutputStream outputStream = null;
BufferedReader br = null;
private DataOutputStream output = null;
public SocketClient(String ip, int port) {
threadAlive = true;
this.ip = ip;
this.port = port;
}
@Override
public void run() {
try {
// 연결후 바로 ReceiveThread 시작
socket = new Socket(ip, port);
//inputStream = socket.getInputStream();
output = new DataOutputStream(socket.getOutputStream());
receive = new ReceiveThread(socket);
//endian = new Endian();
receive.start();
} catch (IOException e) {
e.printStackTrace();
}
}
}
//메시지 수신
class ReceiveThread extends Thread {
private Socket socket = null;
DataInputStream input;
public ReceiveThread(Socket socket) {
this.socket = socket;
try{
input = new DataInputStream(socket.getInputStream());
}catch(Exception e){
}
}
public void run() {
try {
Log.d("=============", "받기전");
while (input != null) {
//int read;
byte[] buffer = new byte[4];
Arrays.fill(buffer,(byte)0);
input.read(buffer);
String bar=new String(buffer).replaceAll("\0","");
Log.d("=============", bar);
Log.d("========", Integer.toString(progressCheck));
Message hdmsg = msghandler.obtainMessage();
hdmsg.what = 1111;
hdmsg.arg1 = Integer.parseInt(bar);
msghandler.sendMessage(hdmsg);
}
} catch (IOException e) {
e.printStackTrace();
}catch(Exception e){
}
}
}
//메시지발신
class SendThread extends Thread {
private Socket socket;
DataOutputStream output;
String msg;
public SendThread(Socket socket,String msg) {
this.socket = socket;
this.msg=msg;
try {
output = new DataOutputStream(socket.getOutputStream());
} catch (Exception e) {
}
}
public void run() {
try {
output = new DataOutputStream(socket.getOutputStream());
output.writeUTF(msg);
//output.writeUTF(new String(msg).replaceAll("\0",""));
} catch (IOException e) {
e.printStackTrace();
} catch (NullPointerException npe) {
npe.printStackTrace();
}
}
}
}
라즈베리파이 부분(server)
회로도
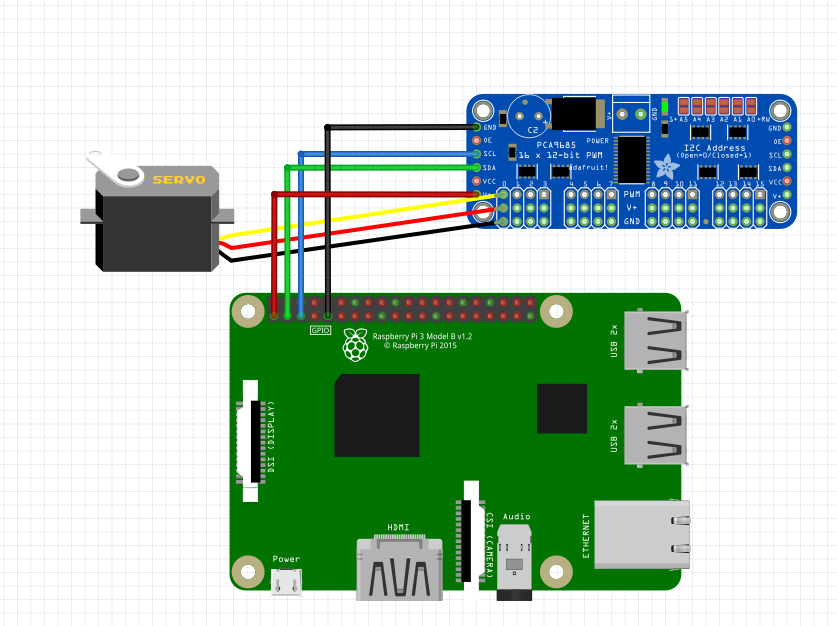
server.py
# -*-coding:utf-8-*-
import socketserver
import threading
import Adafruit_PCA9685
import struct
HOST = ''
PORT = 41000
lock = threading.Lock() # syncronized 동기화 진행하는 스레드 생성
class ServoMotorManager():
def __init__(self):
# PWM 드라이버 사용을 위한 객체 생성
self.robot_handle = Adafruit_PCA9685.PCA9685()
self.servoMin = 150 # 서보모터 동작 최소 pulse 값
self.servoMax = 550 # 서보모터 동작 최대 pulse 값
# 주파수를 50hz로 지정
self.robot_handle.set_pwm_freq(50)
# 서모모터 동작 각도와 pulse 값을 맵핑시켜 주기위한 함수
self.a_arm = 90
self.b_arm = 90
self.c_arm = 90
self.d_arm = 90
self.e_arm = 90
self.f_arm = 90
#서보모터 펄스
def map(self,value, min_angle, max_angle, min_pulse, max_pulse):
angle_range = max_angle - min_angle
pulse_range = max_pulse - min_pulse
scale_factor = float(angle_range) / float(pulse_range)
return min_pulse + (value / scale_factor)
# 서보모터 각도 이동을 위한 함수
def set_angle(self,channel, angle):
angle_range = 180 - 0
pulse_range = 550 - 150
scale_factor = float(angle_range) / float(pulse_range)
pulse=int(150+(angle/scale_factor))
self.robot_handle.set_pwm(channel, 0, pulse)
def servoController(self,data):
if not data:
return -1
print(data)
if data[0] == '0':
if data[1] == '0' and self.a_arm > 0:
self.a_arm = self.a_arm - 10
elif data[1] == '1' and self.a_arm < 180:
self.a_arm = self.a_arm + 10
self.set_angle(int(data[0]), self.a_arm)
return self.a_arm
elif data[0] == '1':
if data[1] == '0' and self.b_arm > 0:
self.b_arm = self.b_arm - 10
elif data[1] == '1' and self.b_arm < 180:
self.b_arm = self.b_arm + 10
self.set_angle(int(data[0]), self.b_arm)
return self.b_arm
elif data[0] == '2':
if data[1] == '0' and self.c_arm > 0:
self.c_arm = self.c_arm - 10
elif data[1] == '1' and self.c_arm < 180:
self.c_arm = self.c_arm + 10
self.set_angle(int(data[0]), self.c_arm)
return self.c_arm
elif data[0] == '3':
if data[1] == '0' and self.d_arm > 0:
self.d_arm = self.d_arm - 10
elif data[1] == '1' and self.d_arm < 180:
self.d_arm = self.d_arm + 10
self.set_angle(int(data[0]), self.d_arm)
return self.d_arm
elif data[0] == '4':
if data[1] == '0' and self.e_arm > 0:
self.e_arm = self.e_arm - 10
elif data[1] == '1' and self.e_arm < 180:
self.e_arm = self.e_arm + 10
self.set_angle(int(data[0]), self.e_arm)
return self.e_arm
elif data[0] == '5':
if data[1] == '0' and self.f_arm > 0:
self.f_arm = self.f_arm - 10
elif data[1] == '1' and self.f_arm < 180:
self.f_arm = self.f_arm + 10
self.set_angle(int(data[0]), self.f_arm)
return self.f_arm
#socketserver.BaseRequestHandler 이것은 모든 요청 처리기 객체의 슈퍼 클래스입니다. 아래에 주어진 인터페이스를 정의합니다. 구상 요청 처리기 서브 클래스는 새 handle() 메서드를 정의해야 하며, 다른 메서드를 재정의할 수 있습니다. 각 요청에 대해 서브 클래스의 새 인스턴스가 만들어집니다.
class MyTcpHandler(socketserver.BaseRequestHandler):
#유저 관리하는 클래스
servoMotorMan=ServoMotorManager()
#이 함수는 요청을 서비스하는 데 필요한 모든 작업을 수행해야 합니다. 기본 구현은 아무것도 수행하지 않습니다. 몇 가지 인스턴스 어트리뷰트를 사용할 수 있습니다; 요청은 self.request로 제공됩니다; 클라이언트 주소는 self.client_address로 제공됩니다; 서버별 정보에 액세스해야 하는 경우를 위해 서버 인스턴스는 self.server로 제공됩니다.
def handle(self): # 클라이언트가 접속시 클라이언트 주소 출력
print('[%s] 연결됨' % self.client_address[0])
try:
#username = self.registerUsername()#유저생성
msg = self.request.recv(1024)
#print(msg)
msg=msg[2:4]
print(msg)
self.request.send(str(self.servoMotorMan.servoController(str(msg.decode()))).encode())
#self.servoMotorMan.servoController(str(msg.decode()))
while msg:
msg = self.request.recv(1024)
msg=msg[2:4]
a=str(self.servoMotorMan.servoController(str(msg.decode())))
print(a)
self.request.send(a.encode())
except Exception as e:
print(e)
print('[%s] 접속종료' % self.client_address[0])
#socketserver.TCPServer 클라이언트와 서버 간에 연속적인 데이터 스트림을 제공하는 인터넷 TCP 프로토콜을 사용합니다. bind_and_activate가 참이면, 생성자는 자동으로 server_bind()와 server_activate()를 호출하려고 시도합니다. 다른 매개 변수는 BaseServer 베이스 클래스로 전달됩니다.
#socketserver.ThreadingMixIn 비동기 동작을 지원
class ChatingServer(socketserver.ThreadingMixIn, socketserver.TCPServer):
pass
def runServer():
print('+++ 채팅 서버를 시작합니다.')
print('+++ 채텅 서버를 끝내려면 Ctrl-C를 누르세요.')
#server.serve_forever 명시적인 shutdown() 요청이 있을 때까지 요청을 처리합니다. poll_interval 초마다 shutdown을 확인합니다. timeout 어트리뷰트를 무시합니다. 또한 service_actions()를 호출하는데, 서브 클래스나 믹스인이 주어진 서비스에 특정한 동작을 제공하기 위해 사용할 수 있습니다. 예를 들어, ForkingMixIn 클래스는 service_actions()를 사용하여 좀비 자식 프로세스를 정리합니다.
try:
server = ChatingServer((HOST, PORT), MyTcpHandler)
server.serve_forever()
except KeyboardInterrupt:
print('--- 채팅 서버를 종료합니다.')
server.shutdown()
server.server_close()
runServer()
반응형
'라즈베리파이' 카테고리의 다른 글
| 라즈베리파이OS 라즈비안 NAS and Torrent #4 (0) | 2021.01.02 |
|---|---|
| 라즈베리파이OS 라즈비안 보안강화 #3 (0) | 2020.12.31 |
| 라즈베리파이OS 라즈비안 한글설치 GUI원격제어 #2 (0) | 2020.12.31 |
| 라즈베리파이OS 라즈비안 설치 및 ssh #1 (0) | 2020.12.31 |
| 라즈베리파이 음악스트리밍서버 만들기(cherryMusic) (0) | 2020.06.23 |





최근댓글